34. Learning from Sensor Data
Initial Scenario
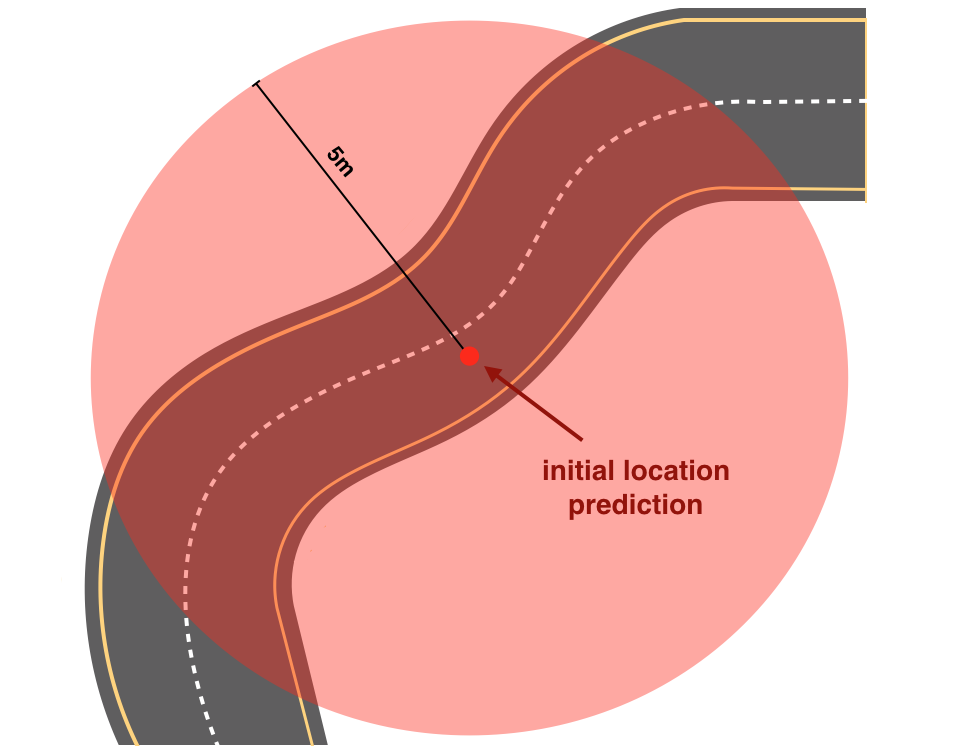
Map of the road and the initial location prediction
We know a little bit about the map of the road that our car is on (pictured above). We also have an initial GPS measurement; the GPS signal says the car is at the red dot. However, this GPS measurement is inaccurate up to about 5 meters. So, the vehicle could be located anywhere within a 5m radius circle around the dot.
Sensors
Then we gather data from the car's sensors. Self-driving cars mainly use three types of sensors to observe the world:
- Camera , which records video,
- Lidar , which is a light-based sensor, and
- Radar , which uses radio waves.
All of these sensors detect surrounding objects and scenery.
Autonomous cars also have lots of internal sensors that measure things like the speed and direction of the car's movement, the orientation of its wheels, and even the internal temperature of the car!
Sensor Measurements
Suppose that our sensors detect some details about the terrain and the way our car is moving, specifically:
- The car could be anywhere within the GPS 5m radius circle,
- The car is moving upwards on this road,
- There is a tree to the left of our car, and
- The car’s wheels are pointing to the right.
Knowing only these sensor measurements, examine the map below and answer the following quiz question.
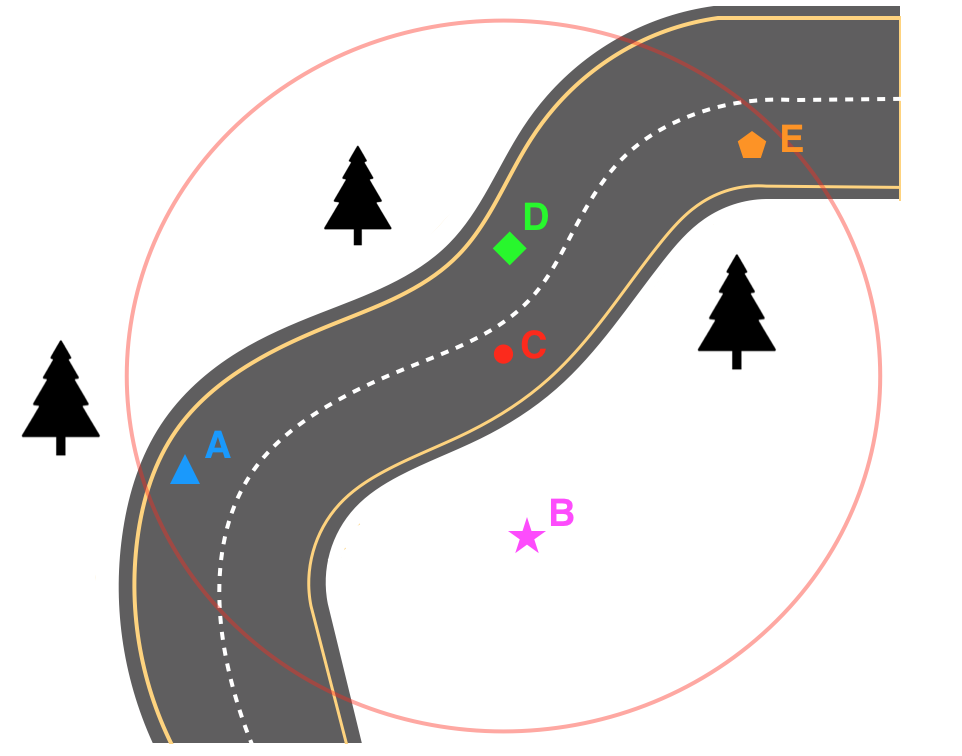
Road map with additional sensor data
Updated location prediction